
Robots cartesianos de sobremesa ya ensamblados y listos para operar, de 2 a 4 ejes, construcción de tipo cantilever y de tipo puente, hasta 500 x 500mm, ideal para cadenas de montaje y laboratorios.
Los robots cartesianos son los equipos multi-eje más extendidos en la industria, diseñados y fabricados para multitud de aplicaciones y procesos. Una versión de la amplia familia de robots cartesianos son los robots cartesianos de sobremesa, o robots Tabletop, dispositivos compactos ya terminados que no requieren de un trabajo previo laborioso para disponerlos a producir. Los robots de sobremesa están preparados para ser montados simplemente sobre una mesa y ya incorporan en un único dispositivo compacto la plataforma donde se apoya la pieza sobre la que se va a trabajar, el brazo robótico cartesiano que maneja la herramienta de proceso y el controlador programable con amplia capacidad de almacenamiento de los programas a ejecutar.
Los robots cartesianos de sobremesa son ampliamente utilizados en cadenas de producción industrial para procesos tales como el ensamblado de componentes diversos, operaciones de atornillado, aplicación de selladores, siliconas y adhesivos, soldadura selectiva, inspección de dispositivos aplicando una cámara de visión al eje Z, pequeños fresados de materiales no demasiado duros, así como una extensa introducción en pequeños talleres y laboratorios para trabajos que requieren precisión y calidad pero no se dispone de grandes espacios.
Los factores de decisión más importantes para seleccionar un robot de sobremesa son:
- 2, 3 o 4 ejes, si se necesita XY, XYZ o XYZ+R respectivamente.
- Rango de recorrido de los ejes XYZ.
- Velocidades de desplazamiento de los diferentes ejes.
- Tamaño de la pieza a procesar.
- Masa a manipular por el eje cartesiano más externo, normalmente la masa de la herramienta.
- Espacio disponible donde montar el robot.
- Medidas de seguridad en caso de ir sobre una mesa desprotegida.
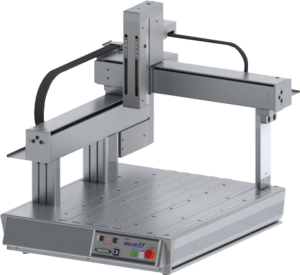
Los robots cartesianos de sobremesa de la familia TTA de IAI son dispositivos ultra-compactos fabricados en dos principales formatos constructivos, cantilever y puente. Los robots de sobremesa en cantilever constan de una plataforma completamente libre donde apoyar la pieza a trabajar de forma estática y todos los brazos del robot cartesiano elevados sobre esta de manera secuencial, el eje Y sobre el eje X, el eje Z sobre el eje Y, y el eje R en caso de existir ensamblado sobre el eje Z. En el caso de los robots de tipo puente, en cambio, la plataforma incorpora directamente tanto el eje X, convertido en plataforma móvil donde se acopla la pieza, como el brazo robótico cartesiano elevado, que en este caso empieza por el eje Y, sobre el que se monta el eje Z y finalmente el eje rotativo R si lo hubiera.
Con dos motorizaciones diferentes, motor paso a paso para las aplicaciones menos exigentes pero más sensibles en precio, y motor servo para los mayores requerimientos de velocidad, aceleración y capacidad de carga, en todos los casos los robots de sobremesa TTA incorporan encoder absoluto libre de mantenimiento en los ejes lineales XYZ con los que garantizar unas excelentes prestaciones de repetitividad de posicionado y precisión de trayectoria.
Los robots cartesianos de sobremesa TTA incorporan el controlador inteligente programable en el propio chasis de la máquina. Multitud de potentes funciones programables y trayectorias interpoladas hacen del robot IAI una solución de altas prestaciones con un coste muy reducido. Con la herramienta SEL Program Generator es posible editar gráficamente en la pantalla de un PC el trabajo del robot, tanto los puntos de posicionado como las trayectorias, lo que reduce el tiempo de programación del proceso y mejora la productividad. Adicionalmente es posible importar archivos DXF como punto de partida a generar un programa SEL. La plataforma de programación SEL de los robots IAI es universal para todos los dispositivos IAI multi-eje, ya se trate de simples ejes individuales, los robots cartesianos más potentes y grandes, o robots SCARA de alta velocidad, por lo que el código programado es exportable e intercambiable entre diferentes arquitecturas dentro de IAI.
Los robots de sobremesa TTA están disponibles en modalidades de 2 grados de libertad X-Y, 3 grados de libertad X-Y-Z y 4 grados de libertad de ejes cartesianos X-Y-Z más eje rotativo R. Existen diferentes tamaños desde 200x150mm hasta 500x500mm en XY, recorridos en Z hasta 150mm y capacidades de carga hasta 15kg en eje Z. Opcionalmente se incluye pies de anclaje si se desea fijar el robot a una cadena de montaje, y existen alternativas de diferentes alturas de elevación del robot cartesiano sobre su propia plataforma.




| Ver otros productos de | IAI |