Manipuladores pick and place resultantes de la unión en X-Z de motores lineales, unidades pick and place de alta dinámica y precisión, diferentes capacidades de carga y recorridos, integración sencilla, versiones acero inoxidable.
La manipulación de piezas, productos y componentes es uno de los procesos más automatizado en cualquier cadena de producción industrial. Los productos se recogen de ciertas posiciones y se depositan en otras, a veces porque se está transfiriendo este producto entre dos células que realizan diferentes trabajos sobre el producto, a veces incluso el propio manipulador procesa directamente dicho producto.
 En cualquier sector industrial, ya sea alimentación, automoción, electrónica o farmacia entre muchos otros, las piezas se recogen y depositan en bandejas, cajas, paquetes, cintas transportadoras, utillajes de trabajo… se ensamblan unas con otras, se transportan a unidades de inspección por sensores y por visión… y todas estas operaciones tienen como nexo en común la recogida, transporte y descarga de la pieza entre diferentes posiciones.
En cualquier sector industrial, ya sea alimentación, automoción, electrónica o farmacia entre muchos otros, las piezas se recogen y depositan en bandejas, cajas, paquetes, cintas transportadoras, utillajes de trabajo… se ensamblan unas con otras, se transportan a unidades de inspección por sensores y por visión… y todas estas operaciones tienen como nexo en común la recogida, transporte y descarga de la pieza entre diferentes posiciones.
Una unidad pick and place es un dispositivo de manipulación que genéricamente recoge un producto de una ubicación y lo deposita en otra.
Habitualmente la industria se refiere como unidad pick and place a un dispositivo de manipulación cartesiana con 2 grados de libertad (X horizontal – Z vertical) o con 3 grados de libertad (X horizontal – Z vertical – R rotación), que se viste con un utillaje de agarre tal como una pinza, una ventosa o un electroimán.
Aunque no hay ninguna diferencia conceptual, cuando hablamos de más grados de libertad en un sistema cartesiano, X-Y-Z por ejemplo, nos referimos a él como robot cartesiano o robot lineal.
La mayoría de las unidades de pick and place demandadas por la industria se han caracterizado siempre por la búsqueda de la productividad (que sean rápidas) y por la calidad (que sean fiables). A estos dos parámetros ahora se les une la flexibilidad (fabricación flexible: adaptables a cambios de producto a manipular), la trazabilidad (Industria 4.0: trazar, registrar y tomar decisiones con base en los datos del proceso) y la amortización (costes de energía y de mantenimiento). Por todo esto, muchos procesos de pick and place que en el pasado se realizaban mediante unidades neumáticas hoy en día apuestan claramente por módulos pick and place de tecnología eléctrica.
La mayoría de los procesos de pick and place suponen tiempos no directamente productivos, no hay ninguna transformación del producto, sino que tan solo se cambia de lugar sin añadirle valor a su naturaleza. La producción industrial busca que estos procesos de manipulación sean los más rápidos posibles para no perder dinero.
Un proceso de pick and place estándar en X-Z está compuesto básicamente de 8 estados:
Tal y como se puede intuir, cuanto más cortos sean los recorridos, menos tardará el proceso. Esto es especialmente importante en el caso del eje vertical Z, porque 4 de los 8 estados son relativos a desplazamientos de este eje.
Las capacidades de velocidad y, sobre todo, de aceleración y deceleración también son fundamentales en la duración de ciclo.
Los tiempos necesarios por el utillaje para agarrar y soltar el producto también son significativos en el resultado final.
El hecho de que una misma inteligencia de control comande la unidad pick and place al completo permitirá la optimización del tiempo de ciclo, por ejemplo “redondeando” la trayectoria de los ejes X-Z o activando el agarre o suelte del utillaje antes de llegar el eje Z a cota.
A la hora de determinar cuál es la unidad pick and place adecuada para una aplicación necesitaremos conocer las características del proceso:
|
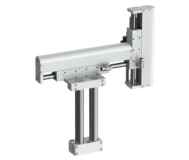
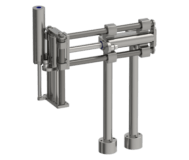
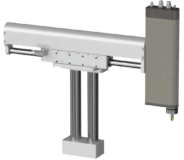
Las unidades pick and place de LinMot de fabricación suiza son dispositivos de prestaciones y calidad del más alto estándar. Basadas en la construcción modular de los módulos lineales DM01, SM01, EM01, FM01 y de la unidades lineal-rotativas PR01 y PR02, estos robots pick and place se basan en tecnología probada de motor lineal tubular, hábiles para las aplicaciones más exigentes en velocidad y en tiempo de ciclo.
Las diferentes opciones de módulos lineales LinMot para movimiento horizontal se conectan directamente a las alternativas de módulos lineales de movimiento vertical, similares a las primeras pero con la opción añadida de muelle magnético de compensación vertical. La oficina técnica no necesita invertir esfuerzos en el diseño de la construcción de pick and place. Por otra parte, el diseño discreto con base en módulos lineales estándar aporta las grandes ventajas económicas y de disponibilidad en plazos cortos, algo difícil de lograr en unidades pick and place diseñadas y fabricadas a medida.
Para procesos simples o los más complejos, en materiales de alta calidad, guías lineales de bolas y planas, FDA, construcciones en acero inoxidable IP69, controladores inteligentes con bus de campo industrial EtherCAT, PROFINET, Ethernet-IP, CANopen, Sercos… los pick and place LinMot y su multitud de variantes permiten encontrar una configuración acorde a todo tipo de aplicaciones y de sus necesidades.