
Combinación de módulos y actuadores de motor lineal en las diferentes arquitecturas de robots lineales y pórticos, alta velocidad, protección IP, configuraciones multi-estator.
Dentro de los procesos de manipulación, uno de los más extendidos y a la vez que de arquitectura más sencilla es, sin lugar a duda, el que se puede resolver mediante cinemáticas lineales. Hay muchas cinemáticas para realizar manipulaciones, pero lo más simple es mover en trayectorias X, Y, Z, R, y las combinaciones de ellas. El concepto más sencillo es el de realizar los movimientos X, Y, Z mediante módulos lineales, en combinación con un eje de giro para el R. Los robots lineales, también conocidos como robots cartesianos o robots de tipo pórtico, son dispositivos multi-eje para resolver estos procesos de cinemática cartesiana.
Tan importantes como los propios módulos físicos con que se construyen los robots lineales son los controladores con que se comandan las trayectorias de dichos robots, de manera que se cubran las demandas del tipo de perfil que requiera el proceso, ya sean movimientos independientes entre los diferentes X-Y-Z-R, ya sean movimientos coordinados, trayectorias interpoladas entre diferentes ejes, lineales, circulares, helicoidales, etc.
Para definir el robot lineal adecuado que se necesita para un tipo de proceso en concreto, es imprescindible saber una serie de datos:
|
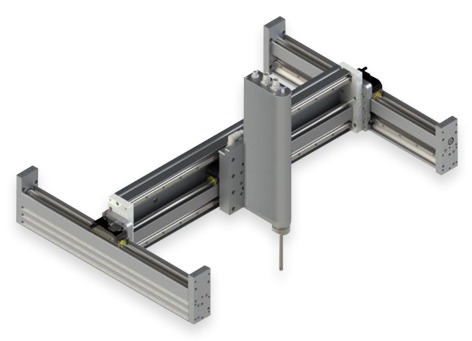
Los robots lineales LinMot, de fabricación suiza, son la solución ideal cuando se requiere la versatilidad de movimiento del robot de ejes cartesianos en combinación con la velocidad y aceleración disponible en el motor lineal de tipo tubular.
Los diferentes módulos lineales LinMot ya han sido diseñados de manera que un robot lineal es tan solo el acople directo entre las combinaciones de módulos lineales estándar. De esta manera no solo se reducen los costes de inversión del robot lineal sino que además el plazo de entrega es de pocos días debido a la disponibilidad prácticamente inmediata de los módulos estándar.
En función de los diferentes tipos de acople y construcción, la oficina técnica diseña con muy poco esfuerzo una composición de robot lineal de diferentes configuraciones, de 2, 3, 4 ejes, multi-estator, gantry, o incorporando eje de giro.
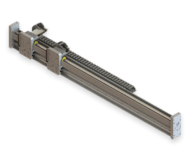
Para cortas longitudes del módulo Y, una combinación del módulo EM01 en X con un módulo Y de tipo FM01 ensamblado en voladizo o cantilever puede ser la solución más adecuada.
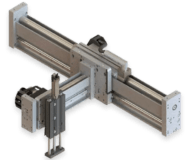
Las configuraciones de robots lineales con doble módulo X en Gantry son especialmente interesantes cuando la longitud del módulo Y es excesiva para ser desarrollada mediante la motorización de solo un extremo del módulo Y. En el caso del Gantry, los dos motores en paralelo no solo aportan el doble de potencia disponible, sino que además reparten la fuerza en un solo punto a dos fuerzas exactamente iguales en dos puntos opuestos.
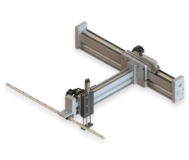
Una propuesta intermedia sería el semi-gantry, con un solo módulo X motorizado, pero el módulo Y apoyado por un extremo en la corredera del módulo X y el otro extremo apoyado con una guía neutra.
Las soluciones de módulo lineal DM01, EM01 y FM01 son combinables con las unidades roto-lineales PR01 y PR02, aportando a estas últimas el eje Z junto con el giro R. Las unidades lineales rotativas de LinMot, en combinación con los pórticos y robots lineales, resolverían óptimamente procesos robóticos de manipulación con giro, de atornillado, de taponado, de roscado y muchos otros más.



| Ver otros productos de | LinMot |