
Motores lineales de construcción tubular y sencilla instalación, para aplicaciones de dinámica extremadamente alta, velocidades hasta 9,5 m/s y aceleraciones que superan los 1010 m/s2, tiempos de posicionamiento cortos y ciclos de alta frecuencia.
La industria, con sus máquinas y procesos, está repleta de accionamientos de movimiento lineal. Muchas partes de máquinas, utillajes y productos se mueven en línea. Desde los anticuados e ineficientes cilindros neumáticos hasta los sistemas propietarios más especiales diseñados y ensamblados por la oficina técnica del fabricante de maquinaria, multitud de accionamientos y dispositivos diferentes tienen distintas características técnicas y prestaciones, pero siempre la misma finalidad: el desplazamiento o la aplicación de fuerza en línea recta.
El uso de motores eléctricos para movimiento lineal está plenamente extendido en la industria. El concepto más extendido es el de emplear un motor rotativo, de tecnología servo, continua o paso a paso, y un mecanismo de transmisión que convierte el movimiento rotativo en movimiento lineal, por ejemplo husillo, conjunto poleas/correas o sistemas de piñón y cremallera.

El motor lineal servo es un motor cuyo diseño constructivo es tal, que convierte la potencia eléctrica del motor directamente en trabajo lineal sin mecanismos intermedios.
Al igual que los motores servos rotativos, el motor lineal servo se fundamenta en dos componentes principales, las bobinas, comúnmente encapsuladas en el estator, y los imanes permanentes, que en los motores rotativos estarían alrededor del rotor y en el motor lineal estarían en línea recta.
En ambos motores, servo rotativo y lineal, el principio es el mismo. La corriente que circula por las bobinas producen un campo magnético, que entra en atracción o contraposición con el campo magnético producido por los imanes permanentes, y genera consecuentemente un par de giro en el motor rotativo y una fuerza lineal en el motor lineal. Es el servo-controlador el encargado de dirigir la intensidad y tensión adecuada a cada bobina, de manera que el par o fuerza producida está controlada. La incorporación de un tercer componente al sistema servo compuesto por el motor y el controlador, el feedback de posición a través del encoder, permite al controlador cerrar el lazo de posición y de velocidad y consecuentemente ser capaz de ejecutar órdenes de trayectoria de movimiento.
Para definir el motor lineal correcto es necesario conocer los datos del proceso:
|
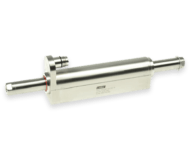
Los motores lineales del prestigioso fabricante suizo LinMot, son motores lineales tubulares. Este interesantísimo modelo de construcción de motor lineal facilita enormemente el trabajo de diseño, construcción y mantenimiento del equipo, en oposición a las grandes dificultades que entraña el instalar los motores lineales planos de tipo tradicional.
El motor lineal LinMot se compone de un estator cilíndrico que embebe las bobinas, la electrónica del encoder y los sensores de temperatura, y de un vástago compuesto de casquillos calibrados de neodimio encapsulados en el cilindro del eje acabado en acero inoxidable.
El vástago LinMot se desplaza en el interior del casquillo de rozamiento del estator sin ningún mecanismo de transmisión.
La potencia recibida por el estator se transforma en el desplazamiento controlado del vástago con respecto a este.
Los motores lineales tubulares de LinMot son dispositivos de movimiento lineal con unas características excepcionales. Con recorridos máximos de hasta cerca de 2 m, con fuerzas de hasta 2720 N y alcanzando velocidades extremas de hasta 9 m/s y aceleraciones de hasta la friolera de 100 G, la amplia gama de motores lineales LinMot cubre las demandas más exigentes de cualquier sector industrial, incluyendo las industrias especiales, automoción, aeronáutica, alimentación, farmacéutica o cosmética entre otras.



| Ver otros productos de | LinMot |