Plataformas de software para programar, depurar, dimensionar y simular la operatividad de los actuadores, robots y controladores IAI, paquete de herramientas potentes, sencillas, y con las máximas prestaciones.
De nada sirve que un dispositivo tenga una mecánica y electrónica de calidad si las herramientas de software asociadas no están a la altura. En el campo industrial en general, y alrededor de actuadores y robots industriales en particular, esto es más importante si cabe.

Cuando nos referimos a las prestaciones de ejes eléctricos y robots, actuadores lineales o de giro, pinzas eléctricas, robots cartesianos y robots SCARA, estas prestaciones están vinculadas indisolublemente con la capacidad de programar y depurar la operatividad de los dispositivos mediante las herramientas de software más adecuadas, y aquí se busca principalmente que estas sean lo suficientemente potentes para poder realizar tareas desde las más sencillas hasta las más complejas, y por otra parte que sean herramientas tanto intuitivas como sencillas de manejar.
En el caso de la firma japonesa IAI, los actuadores y robots industriales se pueden parametrizar y comandar mediante tres diferentes vías: plataformas de software de programación, consolas de programación y a través de bus de comunicaciones.
Distinguimos entre dos principales herramientas de software para la programación y la depuración de aplicaciones de movimiento de actuadores y de robots:
-
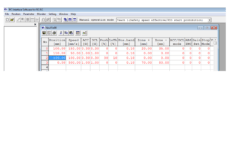
- Plataforma RCM para controladores de modo posición.
Herramienta de software instalable en PC con sistema operativo MS Windows.
Conexión a controladores xCON y xSEP mediante interfaz USB a entrada SIO.
Permite parametrizar una extensa tabla de órdenes simples de movimiento eje por eje, por ejemplo posicionado absoluto, posicionado incremental, modo empuje o salidas de zona entre muchas más funciones.
Utilidades de depuración, monitor, osciloscopio.
- Plataforma RCM para controladores de modo posición.
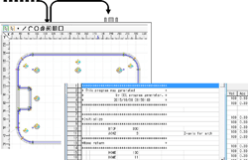
- Plataforma SEL para controladores de modo programación.
Herramienta de software instalable en PC con sistema operativo MS Windows.
Conexión a controladores xSEL mediante interfaz USB.
Interpolación lineal, interpolación circular, punto a punto, path, paletizado, cambio de sistema de coordenadas, cambio de offset de herramienta, saltos, condicionales.
Utilidades de depuración, monitor, osciloscopio.
En el caso del fabricante japonés IAI, el controlador no es un mero componente añadido al actuador, sino parte fundamental en el valor añadido de la solución global. Unas excelentes prestaciones técnicas y de calidad de los actuadores eléctricos y robots no se pueden entender sin el aporte imprescindible de una familia de controladores acorde a los primeros.
En el caso de la consola de operador, las utilidades son similares y comparables con las de las herramientas de software, pero en este caso están embebidas en una consola portátil con una operatividad y estética adaptadas al dispositivo táctil.
Tanto las TB-02 como las TB-03 son hábiles para gestionar tanto la parametrización y manejo de actuadores de controladores xCON y xSEP, como para la programación y manejo de robots cartesianos y SCARA con controladores xSEL.
Una mención especial merece el aplicativo de manejo, programación y diagnosis de los actuadores ELECYLINDER, donde la TB-03 dispone de una interfaz sumamente simplificada acorde a la programación de solo dos posiciones, además de que la conexión entre consola y ELECYLINDER es posible realizarla, de manera opcional, a través de Wireless.
Para aquellos casos donde el comandado de los actuadores o robots se realice a través de bus de campo, las órdenes de movimiento se envían a través de este medio. De todas maneras, el uso de una herramienta de software externa para supervisión y diagnosis sigue siendo de gran interés.
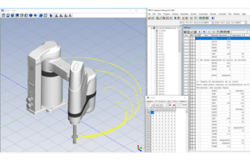
Las herramientas de parametrización, programación y diagnosis se complementan en IAI con tablas de dimensionado de actuadores, para conocer con anterioridad si un eje concreto va a cumplir con unos requerimientos de ciclo, software de simulación de robot SCARA IXA, con el fin de programar y emular en virtual un ciclo completo sin necesidad de robot físico, y todo un paquete de componentes asistentes tecnológicos, para generar programas de secuencia y de procesos tecnológicos de atornillado, dispensado y soldadura de componentes electrónicos, además de importador de archivos DXF.



| Ver otros productos de | IAI |