
Kawasaki Robotics lanza K-ROSET 1.8.3, una nueva versión de su herramienta de simulación
La última actualización añade dos elementos al conjunto de herramientas con los que K- ROSET nos permite simular y programar cualquier robot del portafolio de Kawasaki Robotics (manipulación, pintura, soldadura al arco o por puntos), así como interactuar con elementos 3D (preinstalados o importados de aplicaciones de diseño), analizar tiempos de ciclo, detectar colisiones, determinar ubicaciones factibles de instalación, y otra serie de herramientas.
La primera de las novedades es el AS Language Integrated Development Environment, o AS-IDE, que añade a K- ROSET un entorno de desarrollo que permite editar programas, manipular variables - ya sean reales, de traslación o de precisión – y editar el Interface Panel, entre otras características.
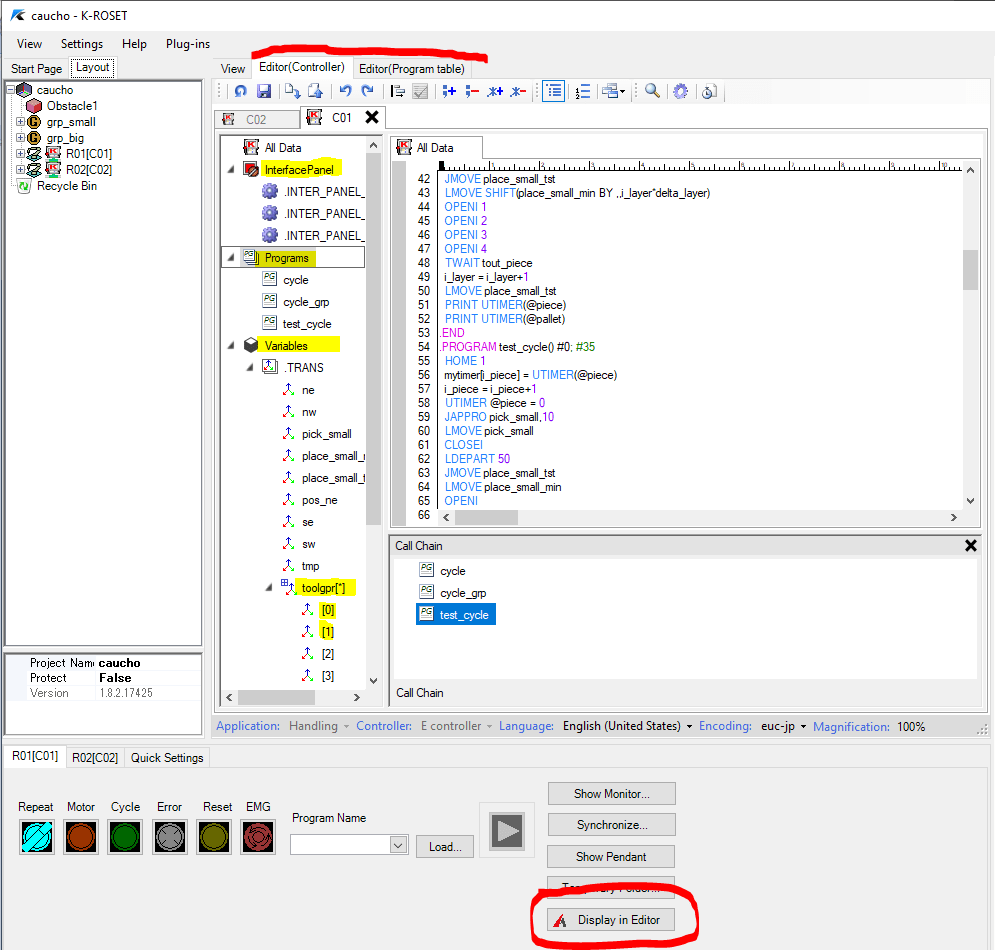
K-Roset contaba ya antes de esta versión, y sigue contando, con la herramienta ‘Program Instructions’, que facilita la edición de programas al permitir seleccionar comandos y parámetros de listas agrupadas. AS-IDE no pretende reemplazar a este elemento, sino que abre el campo a la edición de código en texto con la ayuda de ‘intellisense’, no solo para completar los comandos, sino mostrando la parte de ayuda relevante a la palabra clave.
AS-IDE se conecta exclusivamente al robot virtual dentro del entorno de K-ROSET, si bien también posibilita copiar y pegar directamente del texto, o a través de una copia de seguridad para reutilizar el código y transferirlo al robot real.
La segunda de las novedades es la capacidad de soportar el tipo de datos ‘integer’. Con esta versión deja de ser ‘la olvidada’, aunque es posible que haya quien descubra aquí que los robots Kawasaki también manejan este tipo de datos (aquellos cuyo nombre de variable empieza por ‘@’). Cabe observar que los proyectos guardados con la nueva versión no podrán ser abiertos con versiones anteriores a la 1.8.3, que no soportan este tipo de datos.
 |
De esta manera K-ROSET se convierte en una herramienta aún más completa de lo que ya era. El usuario podrá beneficiarse de estas novedades en sus proyectos de simulación 3D, en los que puede construir representaciones completas de células de trabajo, escribir y ejecutar código de robot específico para su aplicación desde el confort de la pantalla del ordenador; añadir modelos 3D de robot Kawasaki, equipamiento periférico y herramientas; y que cuenta con herramientas para maximizar la efectividad de la simulación, tales como detección de colisión, análisis de tiempo de ciclo o analítica de la posición de instalación, entre otros.
Aquellos usuarios que deseen adquirir la licencia “Enterprise” de K-ROSET o actualizar su licencia para aprovechar las ventajas de AS-IDE pueden ponerse en contacto con nosotros por teléfono o email.
Aquellos usuarios de K-SPARC, el software de paletizado de Kawasaki Robotics, también pueden aprovechar las novedades al estar basado en K-ROSET.
¿Quieres saber más?
Somos servicio técnico, consultoría, training y canal de ventas oficial de Kawasaki Robotics para el mercado español. Para más información sobre K-ROSET puedes contactarnos a través de nuestros medios de contacto habituales.