Actuadores eléctricos lineales y rotativos, robots industriales cartesianos y Scara. Grandes prestaciones a bajo coste, simplicidad de manejo, sustitución de cilindros neumáticos.

Pinzas eléctricas paralelas de 2 garras, dedos con movimiento paralelo, actuación solenoide.

Pinzas eléctricas angulares de 3 garras, programables, dedos con movimiento pivotante.

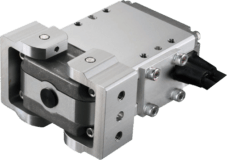
Pinzas eléctricas angulares de 2 garras con protección frente a polvo, programables, dedos con movimiento pivotante.
Pinzas eléctricas angulares de 2 garras para sala blanca, programables, dedos con movimiento pivotante.

Pinzas eléctricas angulares de 2 garras, programables, dedos con movimiento pivotante.

Pinzas eléctricas autocentrantes de 3 garras con protección frente a polvo, programables, dedos con movimiento paralelo.

Pinzas eléctricas autocentrantes de 3 garras para sala blanca, programables, dedos con movimiento paralelo.

Pinzas eléctricas autocentrantes de 3 garras, programables, dedos con movimiento paralelo.

Pinzas eléctricas paralelas de 2 garras con protección frente a polvo, programables, dedos con movimiento paralelo.

Pinzas eléctricas paralelas de 2 garras para sala blanca, programables, dedos con movimiento paralelo.
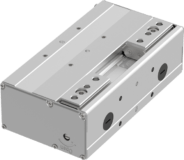
Pinzas eléctricas paralelas de 2 garras, programables, dedos con movimiento paralelo, la más extendida en el mercado.
Pinzas eléctricas paralelas de 2 garras, dedos con movimiento paralelo, actuación solenoide.

Cilindros eléctricos servo prensas con célula de carga integrada, para aplicaciones de grandes fuerzas para aplicaciones de inyección y prensado, hasta 5Tn.

Cilindros eléctricos servo prensas con célula de carga integrada, para aplicaciones de grandes fuerzas para aplicaciones de inyección y prensado, hasta 5Tn.
Robot cartesiano de 6 ejes 2X2Y2Z en formato cantilever, eje X de doble corredera de motor independiente, cada eje Y fijado por su base sobre la deslizadera del eje X, cada eje Z fijado por su deslizadera sobre la deslizadera del eje Y.
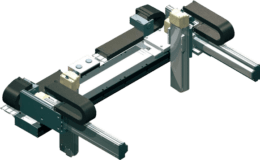
Robot cartesiano de 6 ejes 2X2Y2Z en formato cantilever, eje X de doble corredera de motor independiente, cada eje Y fijado por su base sobre la deslizadera del eje X, cada eje Z fijado por su base sobre la deslizadera del eje Y.
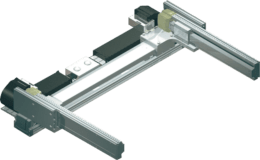
Robot cartesiano de 4 ejes 2X2Y en formato cantilever, eje X de doble corredera de motor independiente, cada eje Y fijado por su base sobre la deslizadera del eje X.
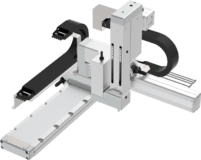
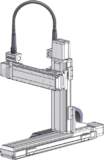
Robot cartesiano de 4 ejes XYZR en formato cantilever, el eje Y fijado por su base sobre la deslizadera del eje X, el eje Z+R fijado por su base sobre la deslizadera del eje Y.
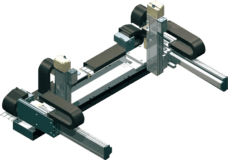
Robot cartesiano de 3 ejes XYZ en formato Gantry, el eje Y lateralmente montado sobre las deslizaderas del eje X más su guía paralela, el eje Z fijado por su deslizadera sobre la deslizadera del eje Y.
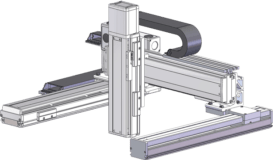
Robot cartesiano de 3 ejes XYZ en formato Gantry, el eje Y lateralmente montado sobre las deslizaderas del eje X más su guía paralela, el eje Z fijado por su base sobre la deslizadera del eje Y.
Robot cartesiano de 3 ejes XYZ en formato Gantry, el eje Y horizontalmente ensamblado sobre las deslizaderas del eje X más su guía paralela, el eje Z fijado por su deslizadera sobre la deslizadera del eje Y.
Robot cartesiano de 3 ejes XYZ en formato Gantry, el eje Y horizontalmente ensamblado sobre las deslizaderas del eje X más su guía paralela, el eje Z fijado por su base sobre la deslizadera del eje Y.
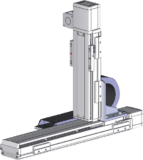
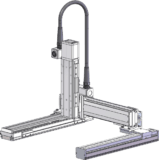
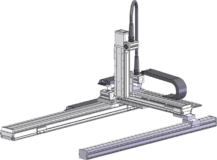
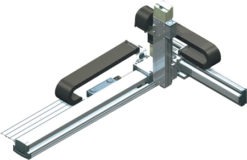
Robot cartesiano de 3 ejes XYZ en formato cantilever, el eje Z fijado por su lateral directamente sobre la deslizadera del eje X, el eje Y fijado por su base sobre la deslizadera del eje Z.
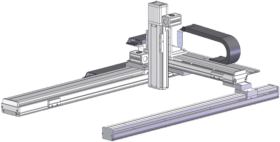
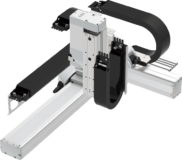
Robot cartesiano de 3 ejes XYZ en formato cantilever, el eje Y fijado por su base sobre la deslizadera del eje X, el eje Z fijado por su deslizadera sobre la deslizadera del eje Y.

Robot cartesiano de 3 ejes XYZ en formato cantilever, el eje Y fijado por su base sobre la deslizadera del eje X, el eje Z fijado por su deslizadera sobre la deslizadera del eje Y.
Robot cartesiano de 3 ejes XYZ en formato cantilever, el eje Y fijado por su base sobre la deslizadera del eje X, el eje Z de tipo mesa fijado por su base sobre la deslizadera del eje Y.
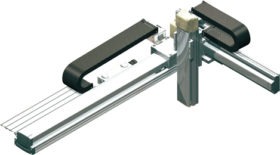
Robot cartesiano de 3 ejes XYZ en formato cantilever, el eje Y fijado por su base sobre la deslizadera del eje X, el eje Z fijado por su base sobre la deslizadera del eje Y.

Robot cartesiano de 3 ejes XYZ en formato cantilever, el eje Y fijado por su base sobre la deslizadera del eje X, el eje Z fijado por su base sobre la deslizadera del eje Y.