
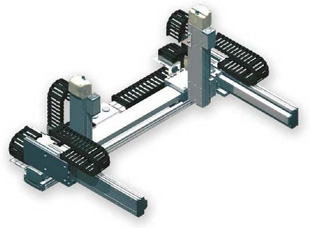
 Con un concepto totalmente modular, los sistemas NS de IAI permiten la rápida incorporación de actuadores con el mínimo esfuerzo de diseño y montaje, permitiendo así la construcción de robots cartesianos o pórticos de hasta 6 ejes. Gracias a su construcción por husillo fijo se pueden montar dos correderas (X, X’) sobre la misma estructura y sobre cada una de ellas otros dos ejes (Y, Z). Se alcanzan velocidades de 2,5 Mts/seg y aceleraciones de 1G, con precisiones de posicionado de 0,1mm o 0,05mm y recorridos de hasta 3 Mts gracias a novedosos soportes intermedios del husillo (escamoteables). El sistema de engrase “Aqseal” se ofrece como estándar de lubricación permitiendo un uso de 3 años (o 5000 Km) sin mantenimiento ni engrase auxiliar. Además un exclusivo sistema de separación de bolas en guías y tuerca hacen al sistema extremadamente silencioso.
Con un concepto totalmente modular, los sistemas NS de IAI permiten la rápida incorporación de actuadores con el mínimo esfuerzo de diseño y montaje, permitiendo así la construcción de robots cartesianos o pórticos de hasta 6 ejes. Gracias a su construcción por husillo fijo se pueden montar dos correderas (X, X’) sobre la misma estructura y sobre cada una de ellas otros dos ejes (Y, Z). Se alcanzan velocidades de 2,5 Mts/seg y aceleraciones de 1G, con precisiones de posicionado de 0,1mm o 0,05mm y recorridos de hasta 3 Mts gracias a novedosos soportes intermedios del husillo (escamoteables). El sistema de engrase “Aqseal” se ofrece como estándar de lubricación permitiendo un uso de 3 años (o 5000 Km) sin mantenimiento ni engrase auxiliar. Además un exclusivo sistema de separación de bolas en guías y tuerca hacen al sistema extremadamente silencioso.
Los sistemas se preparan en base a especificaciones con elementos estándar, obteniéndose a los pocos días el dibujo del sistema en CAD para incorporación al propio diseño y a las cuatro semanas del pedido el montaje completo incluyendo canales portacables, etc.

Respecto al sistema de mando, el XSEL es un driver que hace todas las funciones que requiere el Robot, incluyendo el almacenamiento de posiciones absolutas, relativas, interpolaciones lineales y circulares, funciones de control de colisión (entre las dos correderas), macros de paletizado, despaletizado, activación de señales de interface analógicas o digitales o funciones específicas para sincronización externa, por ejemplo para procesado de piezas en movimiento etc. Se ofrecen además como opción tarjetas de Bus de campo como DeviceNet o Profibus que hacen al sistema fácilmente incorporable al conjunto.
Por último los sistemas “NS” permiten también montar sobre sus correderas pequeños robot SCARA del mismo fabricante (y manejados por el mismo controlador), lo que amplía enormemente la flexibilidad de aplicación.