
Robots cartesianos industriales, desde 2 hasta 6 ejes, diferentes formatos constructivos para todo tipo de aplicaciones.

La topología cartesiana es la más extendida en los robots utilizados en la industria. El robot cartesiano es el robot más simple, pudiendo ser fácilmente comprendido por el usuario dado que, como su nombre indica, el esquema de su movimiento se basa en el sistema de ejes cartesianos X-Y-Z tan bien conocido. Por otra parte, también es el robot más fácil de concebir y fabricar porque su producción es tan sencilla como ir acoplando múltiples actuadores lineales unos sobre otros perpendicularmente. Indudablemente, también es una de las construcciones más económicas.
Un robot cartesiano consta principalmente de una serie múltiple de ejes que se desplazan cada uno de ellos de forma lineal, y entre los diferentes ejes conforman ángulos rectos unos respecto de otros. En los robots más habituales de 2 ejes se parte de un eje principal como base, normalmente un eje horizontal, sobre el cual se ensambla perpendicularmente otro eje, de forma también horizontal con lo que tenemos un robot cartesiano X-Y, o de forma vertical, con lo que obtenemos un robot cartesiano Y-Z. Los robots cartesianos de 3 grados de libertad más extendidos parten de un eje horizontal sobre el que se ensambla un segundo eje perpendicular también horizontal y sobre el cual a su vez se monta el tercer eje perpendicular, en esta ocasión verticalmente, conformando un robot de ejes cartesianos X-Y-Z.
De esta manera una herramienta de trabajo acoplada a la salida del movimiento del último eje se mueve en el espacio X-Y-Z sobre una pieza fijada en el mismo origen de trabajo que el robot cartesiano.
Las aplicaciones de robots cartesianos en la industria son multitud, desde las configuraciones más sencillas de las unidades de pick&place de 2 ejes Y-Z, donde se manipulan piezas que se recogen de un punto y se dejan en otro tras un movimiento de subir-desplazar-bajar, hasta los procesos de mecanizado de las fresadoras más potentes controladas por complejos CNC. Cualquier proceso que incluya desplazamiento de piezas y herramientas en coordenadas cartesianas y a priori no necesite de cambio de ángulos de orientación es susceptible de ser resuelto con un robot de tipo cartesiano.
|
La forma de seleccionar el robot cartesiano más adecuado para una aplicación variará, dependiendo del tipo de proceso que vaya a ejecutar, pero hay una serie de premisas principales que se debe definir:
|
La amplitud de la gama de robots cartesianos de la compañía japonesa IAI es la más amplia del mercado. Con 20 formatos diferentes de construcción y miles de referencias diferentes, los robots cartesianos de IAI abarcan configuraciones desde 2 ejes hasta 6 ejes. En función de la aplicación, IAI provee una solución de robot cartesiano en X-Y, en Y-Z, en X-Y-Z, en X-Z-Y, incorporando un cuarto eje rotativo, con acoples entre ejes a través de la base del actuador lineal o a través de su deslizadera, en cantilever, en Gantry, etc. incluso hasta un único actuador con dos deslizaderas independientes X sobre cada cual se ensambla un Y-Z.
Los robots cartesianos IAI se centran en tres familias principales, IK-P6, ICSB e ICSPA, con un equipo correctamente dimensionado para cada aplicación, siendo capaz de mover masas desde gramos hasta cerca de 80 kg, y recorridos desde 50 mm hasta 3800 mm. Estos equipos se basan en actuadores eléctricos lineales estándar de las familias RCP6, ISB, ISPA y NS, por lo que el integrador del robot o fabricante de la máquina siempre dispone de la alternativa de elegir la adquisición del equipo robótico completo, ya con sus piezas de ensamblaje y cadenas porta-cables (con lo cual lo tiene plenamente operativo en minutos) u optar por adquirir solo los actuadores lineales y aportar sus propios recursos en el desarrollo de las piezas de acople, con su know-how y experiencia interna, que le supone un esfuerzo de tiempo interno, pero, por otra parte, se reduce el coste del equipo.
Con cualquiera de los caminos elegidos, robot cartesiano completo o actuadores sueltos para construcción propia, la solución se complementa con una amplia gama de controladores inteligentes, tanto para comandos de eje individual en modo posición como para programación de comandos de trayectoria interpolada entre los distintos ejes. Además, la compatibilidad de software entre distintas arquitecturas de robot IAI hace que una aplicación desarrollada para una topología de equipo sea fácilmente exportable a otros equipos IAI completamente diferentes.
Ya sea con un robot cartesiano IAI, ya sea con construcción interna a partir de actuadores eléctricos lineales IAI, tanto el fabricante de la célula robótica como el usuario final de la tecnología disponen en IAI de una solución de la más alta cota de prestaciones y calidad para muchos años de fiabilidad y tranquilidad.

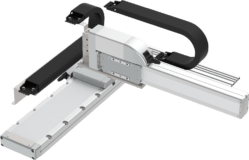
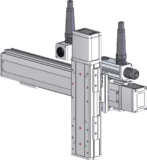


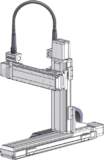
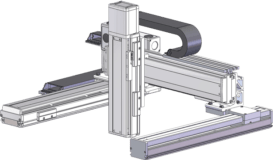
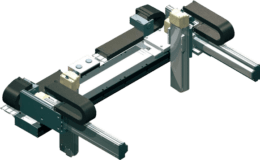
Robot cartesiano de 3 ejes XYZ en formato Gantry, el eje Y horizontalmente ensamblado sobre las deslizaderas del eje X más su guía paralela, el eje Z fijado por su deslizadera sobre la deslizadera del eje Y.
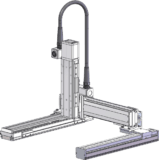
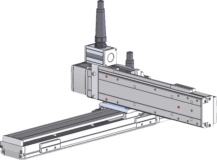
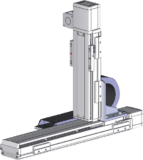
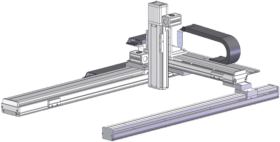
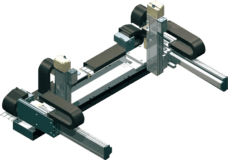
Robot cartesiano de 3 ejes XYZ en formato Gantry, el eje Y lateralmente montado sobre las deslizaderas del eje X más su guía paralela, el eje Z fijado por su deslizadera sobre la deslizadera del eje Y.
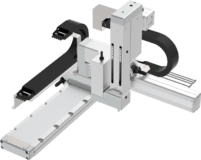
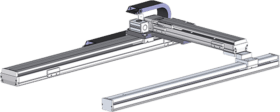
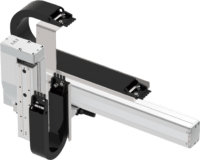
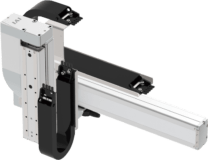
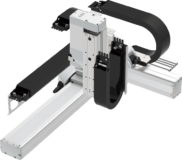
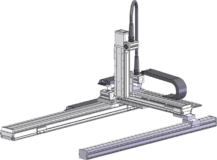
Robot cartesiano de 6 ejes 2X2Y2Z en formato cantilever, eje X de doble corredera de motor independiente, cada eje Y fijado por su base sobre la deslizadera del eje X, cada eje Z fijado por su base sobre la deslizadera del eje Y.
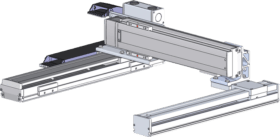
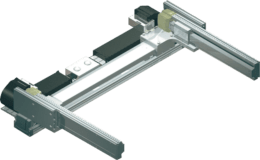
Robot cartesiano de 6 ejes 2X2Y2Z en formato cantilever, eje X de doble corredera de motor independiente, cada eje Y fijado por su base sobre la deslizadera del eje X, cada eje Z fijado por su deslizadera sobre la deslizadera del eje Y.
| Ver otros productos de | IAI |