
Redundancia CODESYS para SoftPLC, aplicaciones de controlador a prueba de fallos desarrollados mediante sistemas CODESYS IEC61131-3.
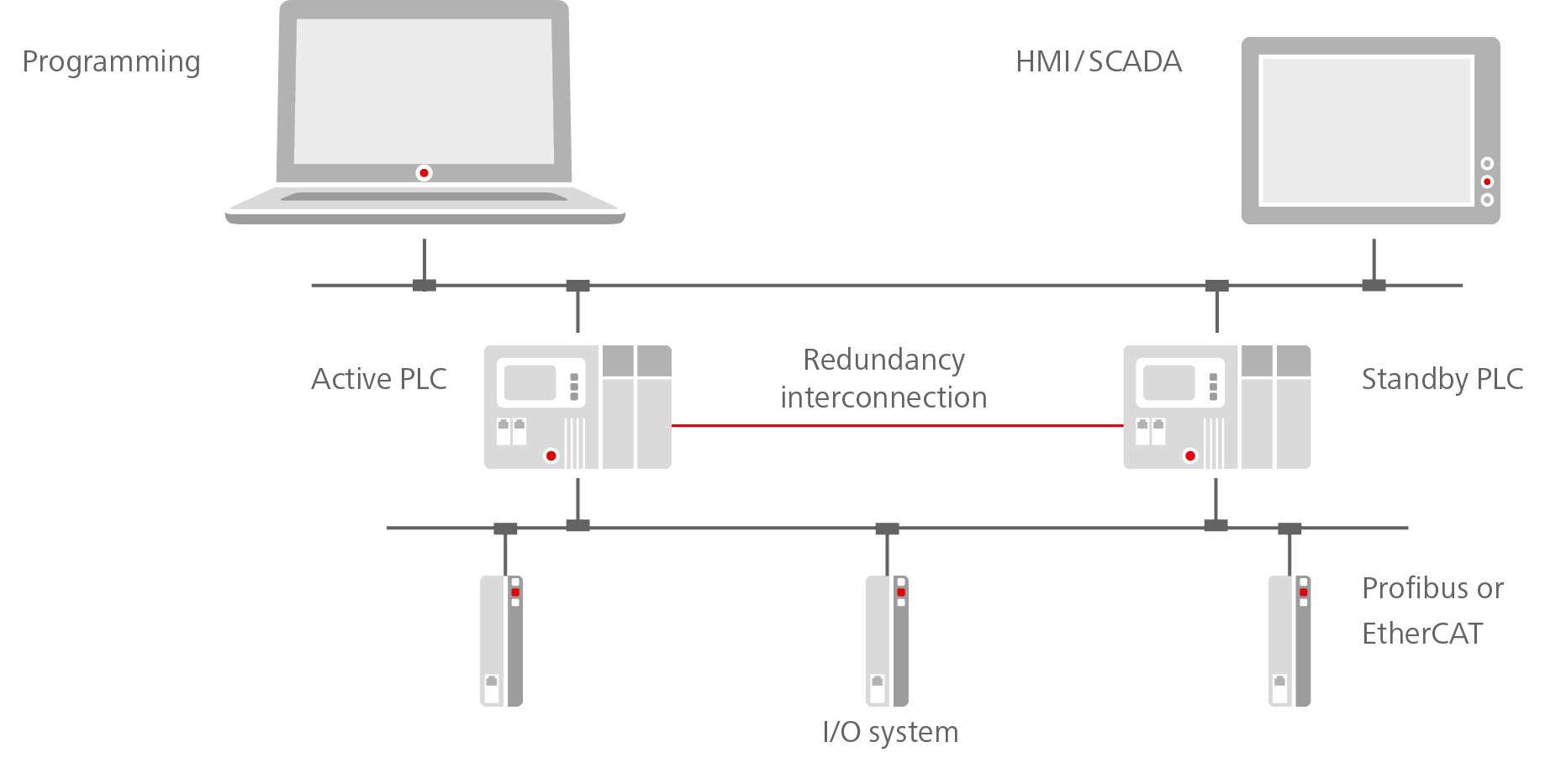
Con la extensión de redundancia del sistema de desarrollo IEC61131-3 de CODESYS es posible el desarrollo de sistemas de controladores redundantes. Dos controladores industriales independientes ejecutan la misma única aplicación IEC61131-3 a la vez que constantemente se controlan y sincronizan uno al otro. En caso de fallo, el controlador pasivo automáticamente se torna en activo y la operatividad continúa sin interrupciones. Solo el controlador activo comunica son el sistema de I/Os.
|
Características:
Funcionalidades:
|
| Ver otros productos de | Codesys |