
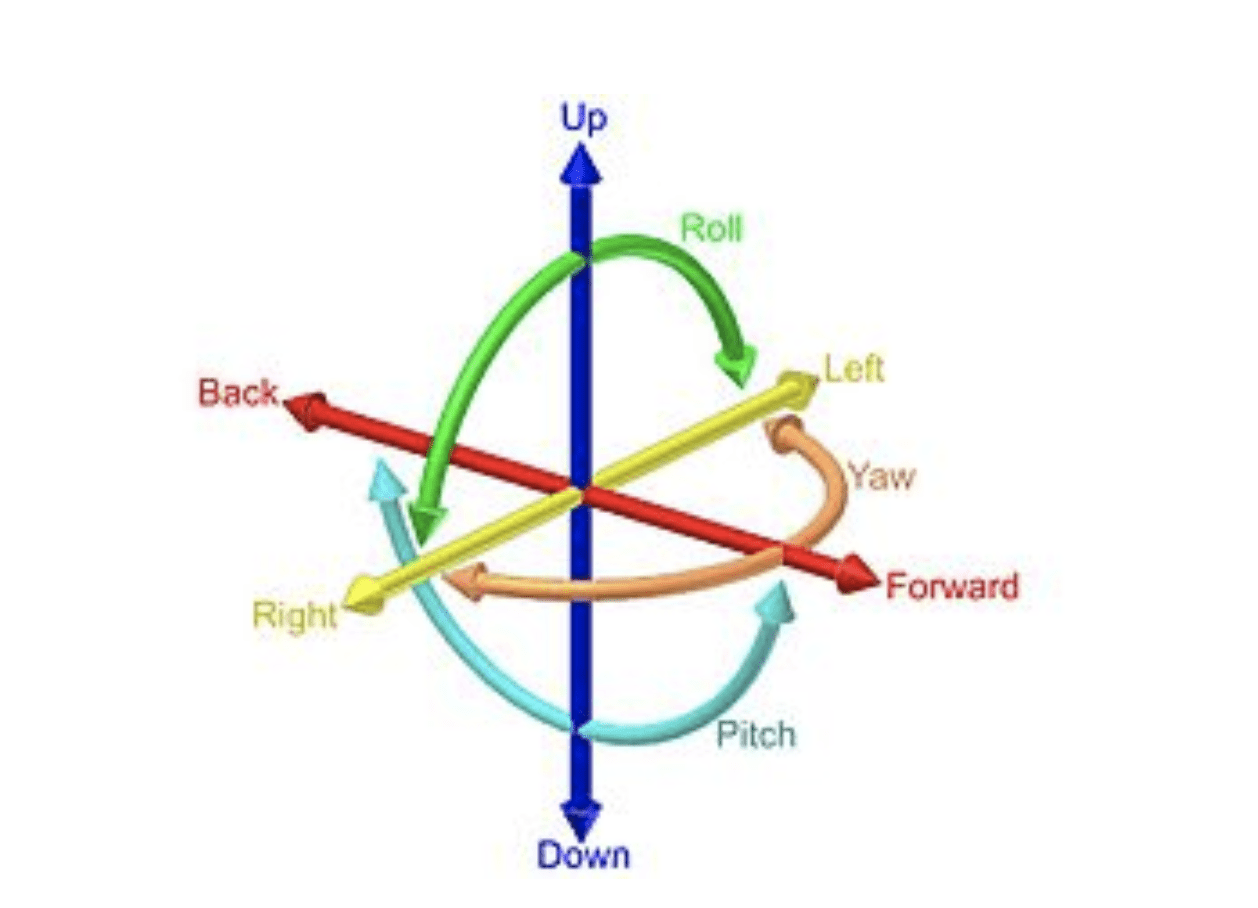
Exploramos los beneficios de uno de los robots más rápidos del mercado
La industria actual demanda multitud de soluciones automáticas para un gran número de aplicaciones de diferentes sectores. Las necesidades varían por lo que las soluciones a las mismas también lo harán, y pueden ir desde necesidades de software, control y programación, hasta necesidades de movimiento.
Estas últimas, las necesidades de movimiento, cuyas soluciones pueden ir desde un simple actuador lineal hasta un robot antropomórfico, ofrecen un gran abanico de opciones según el grado de libertad para un sinfín de necesidades.
Para dejar el concepto de grado de libertad claro, pondremos el ejemplo de una partícula: tiene 3 grados de libertar, es decir, su posición se constituye mediante 3 ejes referentes a su posición (X-Y-Z). En cambio, un sistema de 6 grados de libertad puede posicionarse en un mismo punto mediante distintas configuraciones de los ejes.
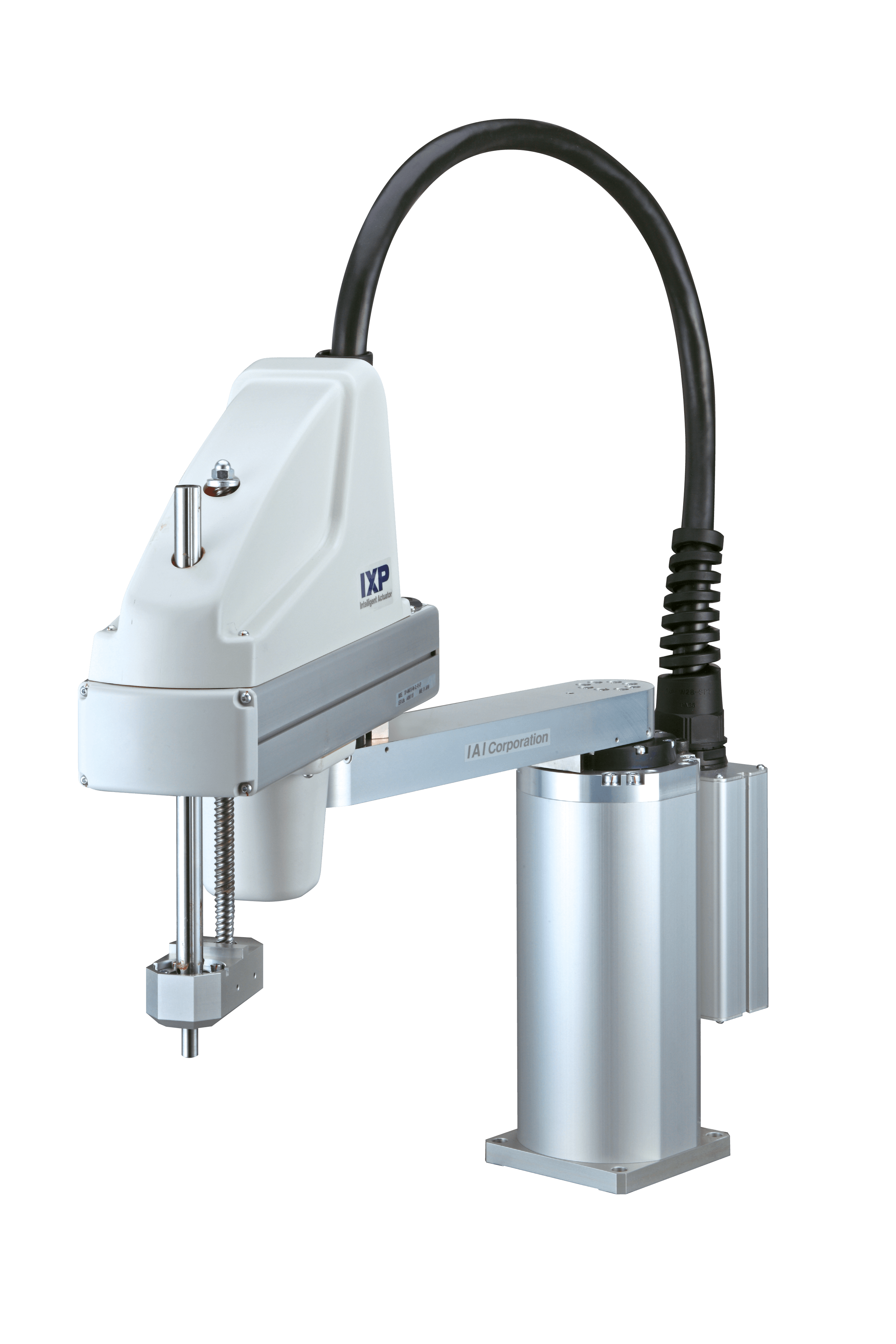
Este artículo se centra en los robots SCARA (acrónimo de Selective Compliance Articulated Robot Arm), que se mueven en X-Y-Z, como los cartesianos, pero incorporan un eje de rotación al final del plano Z.
El uso de robots cartesianos y de seis ejes así como el de brazos robóticos (SCARA) está en aumento, principalmente en tareas que necesitan acelerar los tiempos de ciclo, aumentar el rendimiento y eliminar los cuellos de botella. Cada vez resulta más sencillo manejar un robot gracias a los controles avanzados; se necesitan menos requisitos de programación, y en algunos casos, las herramientas en línea permiten a los usuarios finales y a los OEM elegir y configurar rápidamente las funciones del robot.
Antes de profundizar en los sistemas SCARA, es interesante conocer los diferentes sistemas para generar movimiento que se utilizan en la industria:
Robots cartesianos: son dispositivos mecatrónicos que utilizan motores y actuadores lineales para posicionar, por ejemplo, una herramienta. Realizan movimientos lineales en tres ejes, X-Y-Z, la estructura soporta los ejes y la carga útil, y los movimientos del robot cartesiano permanecen dentro de los límites de la estructura que lo sustenta.

|
Robots SCARA: se mueven en los planos X-Y-Z como los cartesianos, pero incorporan un eje de rotación al final del plano Z para rotar la herramienta, esto hace que sean buenos para operaciones de ensamblaje vertical. La estructura consta de dos brazos unidos en la base y la intersección de los brazos uno y dos, y dos motores independientes utilizan cinemática inversa e interpolación en las uniones J1 y J2 para controlar el movimiento XY. La ubicación final XY al final del brazo dos es un factor del ángulo J1, el ángulo J2, la longitud del brazo uno y la longitud del brazo dos.
|
Robots de seis ejes: pueden posicionarse en un mismo punto de infinitas maneras para ofrecer más control direccional que los SCARA. Esto es adecuado para movimientos complejos que simulan un brazo humano; los robots de seis ejes a menudo ejecutan procesos de soldadura y paletizado.

|



